Probabilistic Collision Prediction for Vision-Based Automated Road Safety Analysis
10th International IEEE Conference on Intelligent Transportation Systems, Seattle, 2007
Nicolas Saunier, Tarek Sayed and Clark Lim
This work aims at addressing the many problems that have hindered the development of vision-based systems for automated road safety analysis. The approach relies on traffic conflicts used as surrogates for collision data. Traffic conflicts are identified by computing the collision probability for any two road users in an interaction. A complete system is implemented to process traffic video data, detect and track road users, and analyze their interactions. Motion patterns are needed to predict vehicle movements and determine their probability of being involved in a collision. An original online algorithm for the learning of prototype trajectories as motion patterns is presented. The system is tested on real world traffic data, including a few traffic conflict instances. Traffic patterns are successfully learnt on two datasets, and used for collision probability computation and traffic conflict detection.
Keywords: Imaging and Image Analysis; Advanced Safety Systems; Data Mining and Analysis
[bib] [pdf] [pdf]
This page offers additional material related to the "Conflict" dataset. The figures regarding the traffic conflict in sequence 1 are reposted, and videos are available at the bottom of the page.

Figure 5: The 58 prototype trajectories learnt on the ten sequences for the training of traffic conflict observers. The tracks are displayed in color, from white to red indicating the number of matched trajectories in the sequence for each pattern, i.e. the traffic volume along these patterns.
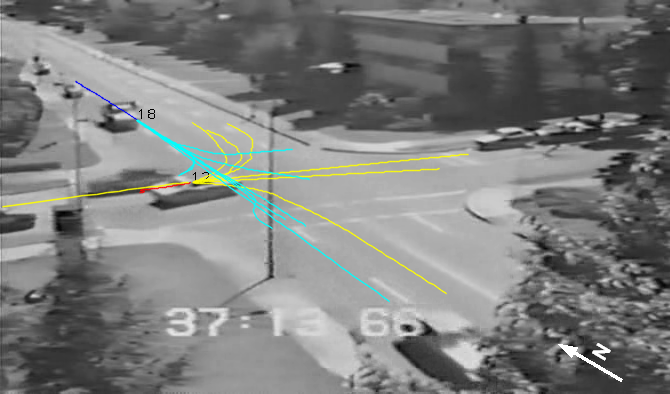
Figure 6: An example of movement prediction in a real traffic conflict situation. The vehicle trajectories are red and blue, with a dot marking their position, and the future positions are respectively cyan and yellow.
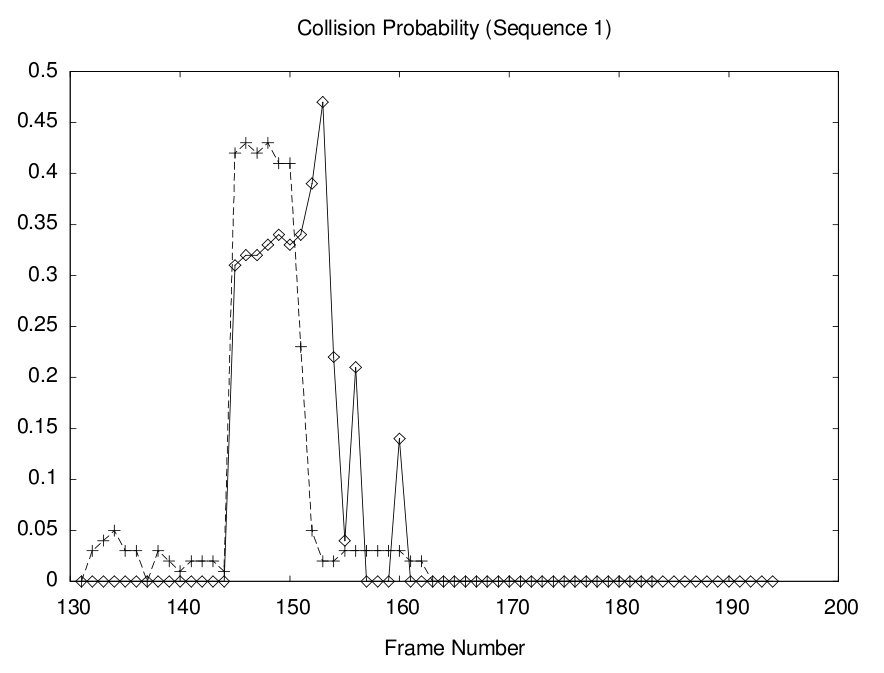
Figure 7: The collision probability for the traffic conflict in sequence 1, as a function of time (counted in frame numbers). Vehicle 1 travels south-bound through the intersection and vehicle 2 comes from an opposing approach and turns left in sequence 1.
Two videos are added (install the cross-platform open source player VLC if the video does not play on your computer):
- The evolution of the learnt prototype trajectories on the "Minnesota" dataset, resulting in 128 prototype trajectories. [avi]
- The evolution of the learnt prototype trajectories on another sequence of the "Minnesota" dataset, not presented in the paper, resulting in 97 prototype trajectories. [avi]
- A video of the conflict of sequence 1, with the future positions for both vehicles as computed by the system (same color code as for Figure 6). [avi]